
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


A.J.S. Rayl • Dec 30, 2005
Mars Exploration Rovers Update: Spirit Descends Husband Hill as Opportunity Works at a Standstill on Olympia
 Mars Exploration Rover
Mars Exploration RoverMars Exploration Rover Color: True color. Credit: NASA / JPL / Maas
The Mars Exploration Rovers have each completed their first Mars Year (687 Earth days) and are close to completing their second Earth year exploring their respective sites on the Red Planet. With both Spirit and Opportunity finding new variations of bedrock in the areas they are exploring, the mission is continuing to send the team holiday gifts in the form of intriguing discoveries.
At Gusev Crater, Spirit -- which celebrated her first Mars year on November 21 and will celebrate her second Earth year January 4 – is continuing her journey down from Husband Hill and into the Inner Basin, having earned the distinction of being the first robot to climb a mountain on another planet. Husband Hill is believed to be the tallest peak in the Columbia Hills, which this rover has been exploring since arriving there in mid-June 2004. Spirit completed studies of a series of targets in bedrock-rich terraces she stopped to check out on the way down hill, and then cruised from there down to a rippled dune field named El Dorado en route to the next major destination.
On the other side of the planet, Opportunity -- which completed her first Mars year December 12 and will celebrate her second Earth year January 24 -- suffered a “broken arm” late last month, while investigating an outcrop dubbed Olympia in Meridiani Planum. Because there is a risk of not being able to use the arm or instruments on the arm if the rover were to stow it as usual should the motor become disabled in the future, the team decided Opportunity would stay put while engineers on Earth determined what she should do. Although Opportunity has not yet moved from Olympia, the rover is working in place using every tool in her toolkit to study and image rock targets and her surroundings, as well as conducting atmospheric research.
Other than Opportunity’s instrument deployment device (IDD) issue, both rovers are in good health, and all instruments continue to function with relatively few problems, which is pretty remarkable given how long the twin robot field geologists have been working. “The rovers have gone through all of the Martian seasons and are now back to late summer,” noted John Callas, deputy rover project manager, at the Jet Propulsion Laboratory (JPL), where the twin rovers were developed. While, in a way, the mission seems like it’s starting all over again, since the rovers keep moving into new areas, the mission always seems like it’s starting again on some level.
Spirit from Gusev Crater
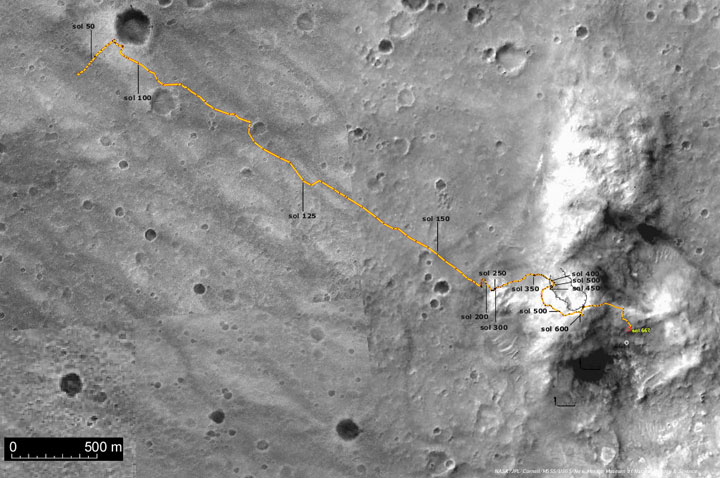 Spirit traverse map from Sol 1 to Sol 680
Spirit traverse map from Sol 1 to Sol 680This image shows the route that Spirit has driven inside Gusev Crater from her first Martian sol to her 680th sol (December 1, 2005), more than one Martian year. The underlying image (previously released) is a mosaic of images from the Mars Orbital Camera (MOC) on the Mars Global Surveyor orbiter. The scale bar at lower left is 500 meters (0.31 mile). As of Sol 680, the rover had driven a total of 5,495 meters (3.41 miles). Color: True color. Created: 28 December 2005.Credit: NASA / JPL-Caltech / MSSS / USGS / NMMNHS
After completing work at the outcrop called Seminole – which included close-up studies of targets there called Abiaka and Osceola -- and finishing a 360-degree panorama of her location at the terraces of bedrock over the Thanksgiving weekend, Spirit moved on to the next target at this site as December blew in. These bedrock-rich terraces were not only visible from the summit of Husband Hill, but can be seen in orbital photographs taken by the Mars Orbital Camera (MOC) onboard the orbiter Mars Global Surveyor, so they were an obvious choice of targets for the MER science team.
During the first week of the month, the rover used her panorama camera (PanCam) to take images of various rock targets there that the team named for Native American tribes -- Algonquin, Miami, Pima, and Yaqui, and then turned to her miniature thermal emission spectrometer (mini-TES) to take measurements of Yaqui, Pima, Algonquin, Meentwioni, and Myammia. On Sol 685 (December 6), the rover successfully drove 16 meters (52 feet) over to the Algonquin outcrop, where she hunkered down for about five days to conduct an intensive study. The rover used her rock abrasion tool (RAT) to brush a target on Algonquin called Iroquet, then continued her examination of Iroquet with the microscopic imager (MI) and alpha particle X-ray spectrometer (APXS). The subsequent analyses of these targets' composition identified abundant olivine and indicated that the outcrop is mafic, meaning they bear a class of usually dark-colored minerals rich in magnesium and iron.
From Algonquin, Spirit roved over to the next terrace target selected for a close-up study, an outcrop dubbed Comanche. The rover performed work with the instruments on her instrument deployment device (IDD) or robotic arm on a specific part of Comanche dubbed Horseback. The RAT’s brush was only partially successful in making contact with Horseback, clearing off roughly 20 percent of the target, but the rover took follow-up images anyway. Then the team had the rover move her IDD to different target on Comanche called Palomino, which Spirit successfully brushed on Sol 700 (December 23). The rover then took images of her handiwork with her MI and studied Palomino with the APXS and the Mössbauer spectrometer.
Since rovers don’t get the usual vacations, Spirit spent the Christmas holiday working. The rover planners, however, made several three-sol plans in single working days, so that while the rover was busy, the crew could take the holidays off, though with a few late nights on the workdays. From Sols 701 to 703 (December 23 to December 25), Spirit completed a long Mössbauer spectrometer integration on the brushed target Palomino, and conducted an overnight reading by the APXS on the same target. She also used the PanCam to take a 16-frame mosaic from Comanche over two sols, as well as images of targets in the immediate vicinity nicknamed Cheyenne, Apache Kickapoo, Chickasaw, and Winnebago, which she also looked at with her mini-TES.
On Sol 703 (Christmas day), Spirit used her MI to take pictures of an intriguing fin-shaped feature on Comanche, dubbed Comanche Spur, and then spent the next couple of days wrapping up the research on that outcrop. “Like everything else we’ve seen since we’ve descended off of Haskin Ridge, Comanche Spur has undergone very little alteration and has a lot of olivine in it,” Squyres noted in his weekly review. “But the composition is different from what we saw at Seminole and Algonguin, so we seem to have yet another rock type at Gusev.”
Following her study of Comanche, Spirit prepared for the rove toward the rippled dune field the team calls El Dorado, as part of a three-sol plan starting on Sol 703. The rover has roved well off the flank of Husband Hill and is getting close to the Inner Basin. The first driving sol began with 22 meters (72 feet) of directed driving followed by autonomous navigation toward the dune fields. The second driving sol would not have the benefit of humans in the loop, and so was purely autonomous navigation, picking up on the heels of the previous sol to get Spirit within striking range of El Dorado. The team expected to get perhaps 80 to 90 meters (263 to 295 feet) from the two sols of driving. But, by the end of Sol 705 (December 27), Spirit had driven 118 meters (387 feet), and was about a one-sol’s drive away from El Dorado.
Sol 706 (December 28) was the week's only normal, single-sol plan, which allowed engineers and scientists to plan a drive into El Dorado and to respond on the next sol with commands for the science objectives there. Once again, the rover drivers came through and Spirit successfully drove 38 meters (125 feet) right into the dunes of El Dorado. The team expected to use the subsequent three-sol plan to trench in El Dorado and the three-sol plan after that to examine the trench.
In order to prepare for the trench, the team planned a scuff at the end of the drive that would be just a third of a wheel turn to push up some of the sandy material to give the engineers some data on the consistency of the material so the team would know how long to trench. When science team members took a look at the scuff, however, they decided it was good enough for the science objectives and there was no need for trenching, so the team ended up three sols ahead of the game. Using the microscopic imager (MI), Spirit inspected the scuff she’d just made in El Dorado on Sol 707 (December 29), homing in on selected target areas dubbed Gallant Knight and Pilgrim, and then studying the soil mounds with her spectrometers.
As December -- and 2005 -- were coming to an end, Spirit was completing her study on El Dorado, and using her PanCam to image these beautiful geologic formations. It was a productive month – and a productive year – for Spirit. In addition to her hike down Husband Hill and the work at the terraces, the rover filled out her December by also performing remote sensing, again observing the Martian moons, Phobos and Deimos, at night, capturing some more pictures of dust devils, performing stares with her mini-TES, conducting atmospheric studies and pulling off some ambitious drives that exceeded the team's expectations. By year’s end, Spirit had driven a total of 5,829 meters (3.62 miles), and had returned some 70,000 images since landing in Gusev nearly two years ago.
“When we first took a look around after landing, the Columbia Hills seemed impossibly far away,” Squyres reminisced. But Spirit proved her mettle and kept on trudging through the tough terrain. She not only made it to the Columbia Hills but became the first explorer to climb – and descend from -- a mountain on another planet. Husband Hill is about as tall as the Statue of Liberty. But, as Squyres noted, “for a little rover, that was a heck of a climb."
Opportunity from Meridiani Planum
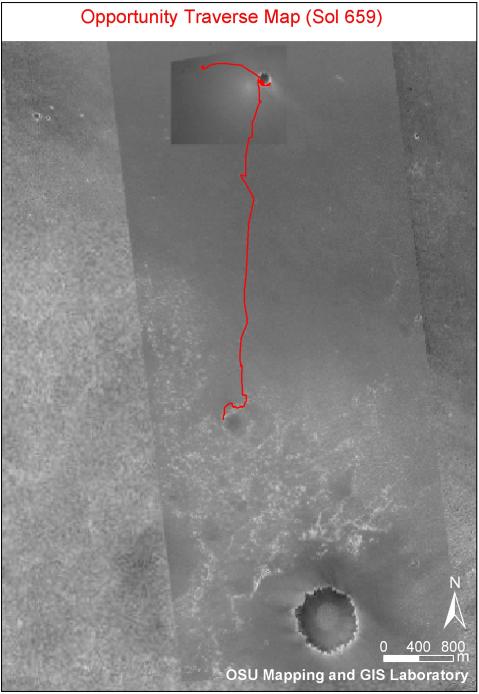 Opportunity traverse map Sols 1-659
Opportunity traverse map Sols 1-659This image shows the route Opportunity has driven from her first sol through Sol 659 (December 1, 2005), and the rover's next major destination, Victoria Crater, the large depression farther south. Color: Greyscale. Created: 28 December 2005.Credit: NASA / JPL-Caltech / MSSS / OSU
Opportunity has not moved much since Thanksgiving – not because of too much “partying,” but, perhaps, from not enough. The rover was in the midst of her traverse around Erebus Crater toward an area called the Mogollon Rim and had stopped on Sol 651 (November 22) to study an outcrop dubbed Olympia with her IDD instruments over the Thanksgiving weekend. But a couple of mornings later, as her ground crew settled in for a day of feasting, Opportunity tried to unstow her IDD or arm to examine that layered outcrop, and it wouldn’t move. The IDD is always stowed – tucked inward toward the rover’s body -- during drives. This time, however, a shoulder-joint motor needed for unstowing the arm stalled and the arm stayed stowed. The arm, which deploys four tools for examining rocks and soils, has already operated more than seven times as long as originally planned, so this type of problem was not really unexpected.
An engineering anomaly team – A-team – formed and performed the first diagnostic activity for Opportunity’s arm on Sol 659 (November 30). Only a very small motion was recorded and so the engineers continued working on diagnostic activities to further characterize the shoulder-joint motor. In subsequent sols, as they worked to narrow the range of possibilities for the cause of the stall, they found that some possible explanations, such as a physical obstruction or degraded lubrication, appeared unlikely.
On Sol 666 (December 8) the engineers were able to get the errant motor to turn successfully by supplying it with more current. It was an encouraging result, but the arm was still in the original stowed position after that test. That effort, however, which rotated the motor four revolutions at each of three different applied voltages, established confidence in the hypothesis that a wire in the winding of the motor had broken and caused the Sol 654 stall.
The original stowed position for the arm while driving -- tucked underneath the rover and hooked on a small pin, leaves the partially failed shoulder azimuth joint at 90 degrees to the direction of travel. That means if the arm stuck in this position they would be unable to use it and hence unable to use any of the instruments on it; therefore, the rover engineers needed to figure out how Opportunity could safely continue her work without stowing her IDD as she always had before.
While the engineers were doing their thing, Opportunity did hers. The science team managed to keep the rover productive with various PanCam and remote-sensing assignments as the A-team worked to “set” her broken arm. “The happy news is that we’re not stuck in yet another sand ripple like Purgatory, but on some very nice layered rocks with lots of interesting textures,” Joy Crisp, MER project scientist, at JPL told The Planetary Society in an interview.
In the target-rich environment of Erebus Crater, the rover acquired a color panorama of her surroundings, a color mosaic of herself, high-resolution images of several outcrop targets and images of Jupiter. The rover also used her mini-TES to successfully collect data on some high-priority science targets and her PanCam to image nearby targets named Drake, Chino Valley, Bellemont, Camp Verde, Young, Cherry, and Paulden.
As the month progressed, MER engineers became convinced that the cause of the shoulder-joint motor stalls was a broken wire in the motor windings. Although the behavior of the motor was still being characterized, the engineers believed Opportunity could still use her arm if they changed one of the parameters so that more current is delivered, with the understanding that the motor can still stall as the motor parameters are being adjusted. By making the necessary changes, the rover was able to successfully deploy her IDD on Sol 671 (December 13) and she used it immediately to position her MI on a target called Williams.
The team planned a two-image-by-two-image mosaic with the MI on Williams to be followed by a reading with the Mössbauer spectrometer. The rover completed the first half of the mosaic as planned, but the sequence was halted after that due to a stall of the shoulder-joint motor. On Sol 672, the rover made atmospheric and photometric observations, while engineers continued working on her broken arm.
On Sol 673 (December 15), Opportunity initiated her commands to complete the MI mosaic on Williams and then place the Mössbauer spectrometer on it for along integration. But the shoulder-joint motor stalled once again. After analysis of the Sol 673 stall, the team redelivered a command sequence to close the MI’s dust cover and to position the APXS for an overnight integration on Williams. As the rover worked through her night, the A-team on the ground continued analysis for determining the best strategy for keeping the arm unstowed even when it is not in use.
From Sol 675 through Sol 681 (December 17-23), the A-team experimented driving the test rover at JPL’s Mars Yard with the arm’s "elbow" sticking out towards the front of the vehicle, and the arm's instrument cluster above the solar panels. From that position, the instrument arm could still be used without using the suspect azimuth joint. The variations included leaving the instrument cluster in mid-air, or resting one or another instrument on different portions of the rover for stability.
Despite the fact that she didn’t really move at all, Opportunity didn’t run out of things to do and never sat idle in December. While at a standstill along the rim of Erebus Crater, the rover completed an intensive campaign of atmospheric science, with sky surveys, photometry observations at several times of day, and atmospheric observations with the mini-TES. She also observed more ground targets with her PanCam and mini-TES, completed acquiring hundreds more images for a 360-degree, multi-filter panorama of Erebus Crater – the richest panorama on the mission to date, and eventually used her arm and its instruments to investigate rocks within her reach.
Opportunity spent Christmas with a rock target named Ted, examining it with her MI, and conducting long integrations with the Mössbauer spectrometer and the APXS. In the ensuing days, the rover used her PanCam to take pictures of other targets named Claypool, Paulden, and Vernon, then closed out the year by moving her IDD to a nearby rock called Hunt, which she checked out with her MI and spectrometers.
“We’ve been at Olympia long enough now that it’s probably the best-imaged place on the entire planet,” said Squyres. Nevertheless, he and the team are confident they will get Opportunity roving again soon.
At year’s end, Opportunity's total odometry remained at 6,502 meters (4.04 miles), and all told the rover has returned some 55,000 images since landing January 24, 2004.
Support our core enterprises
Your support powers our mission to explore worlds, find life, and defend Earth. You make all the difference when you make a gift. Give today!
Donate