
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


Emily Lakdawalla • Feb 13, 2014
Curiosity Update, sols 534-540: Over Dingo Gap, onto softer sand
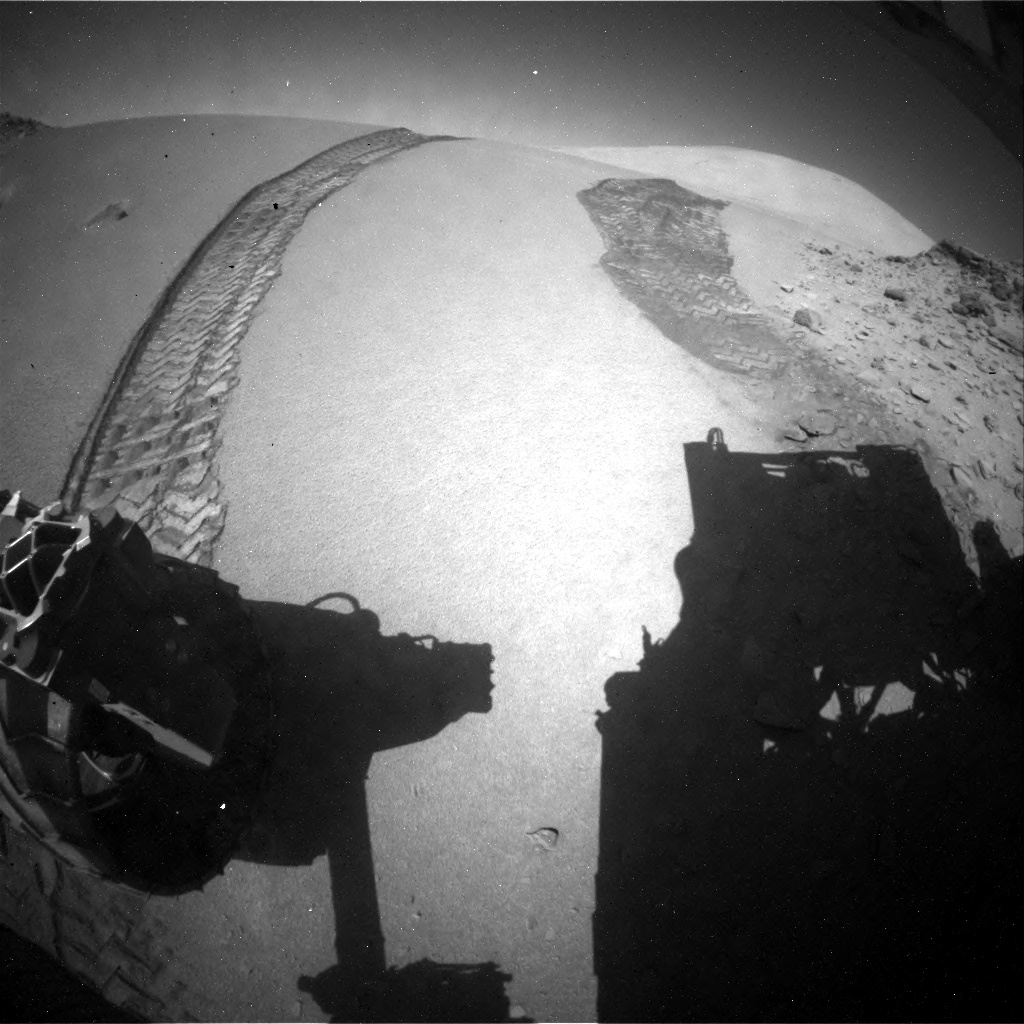
After weeks of very slow driving due to concern about the wheels and time spent choosing whether to enter "Dingo Gap" or not, Curiosity has safely crossed the dune and resumed longer drives, achieving 75 meters and crossing the 5-kilometer mark on sol 540. This is a bit of a rambly post combining interviews of Curiosity deputy project scientist Ashwin Vasavada with the usual brief update information from Ken Herkenhoff's USGS Astrogeology blog posts. I talked with Ashwin last week, as they were preparing to drive over Dingo Gap, and again this morning. For context, here's the most recent version of Phil Stooke's route map to show you their current progress.

I'd called Ashwin because I wanted to see if he was ready to talk about some of the issues they're working with on Curiosity's wheels. It's very clear if you look at that map that they were making fast drive progress until about sol 472, when their drive distances got much shorter. At the same time, they've been spending lots and lots of precious data volume taking images of the wheels before, during, and after drives. Every few drives, they have devoted a ton of data volume to a thorough survey of all sides of the wheels:

I have asked different people about the wheels before but the mission is being pretty close-mouthed about it. I still can't provide you a lot of detail about what their specific concerns are, but Ashwin was able to tell me a bit about how the concern is affecting their planning. That's partially because project scientist John Grotzinger has also started talking about the wheel damage more freely. Here's an excerpt from a Los Angeles Times article about the rover's recent activity (emphasis mine):
....recent unexpected damage to the rover’s wheels – a surprising number of scratches and scars in their thin metal – had them reevaluating the rocky terrain.
“That gave us concern," Grotzinger said. "We expect to get damage to the wheels, but we were surprised at the rate.”
They think that’s in part because the harsh winds of Gale Crater, ideal for revealing fresh organic matter, have a drawback: They tend to whittle rocks down to pointy little pyramids perfect for piercing and scraping the rover’s wheels. And since Curiosity is much more massive than its predecessor Opportunity, all that weight bearing down on a tiny sharp point, over and over, might be doing more damage than scientists had expected, Grotzinger said.
The team members decided to take a sharp detour from the unforgiving rapid transit route and head along a route they called the "pink path," but the problem was this very narrow pass standing in their way, filled with a slippery sand dune they named the Dingo Gap. They could try to cross it, but they weren't even sure whether the terrain beyond it would be any easier on the wheels than the rapid transit route.
Ashwin confirmed to me that the drive into Dingo Gap is part of a plan to get to some smoother driving terrain for the rover, and that once they reach better driving terrain, they should be able to increase the distance they drive on a single sol (which they did, in fact, do on sol 540). But as of last week, when I looked down into Dingo Gap, it wasn't immediately obvious what they meant by "smooth terrain" -- there are rocks everywhere.

I asked Ashwin what good driving terrain looks like. He said that some sharp rocks are more concerning than others. Sharp pointy rocks that jut out from bedrock are a problem, but rocks that are sitting loosely on softer soil are not, because they will be pushed down into the soil by the rover's weight. He said they're learning to discern the difference between pointy bedrock areas and more soil-filled areas from orbit, and that once they can start planning paths that go over better terrain they will be increasing their drive distances. This does mean that they are still confined to driving no further than they can confirm from rover images that the terrain is good. That is, so-called "blind driving" only still, no return to autonav yet; it's autonav that was getting them the long drive distances before sol 472. But blind driving got them 75 meters, which is no small distance.
Still, the plan to find sandy soil gave me pause. I asked him: isn't exposed bedrock the whole reason that Curiosity is in Gale crater in the first place? "It is," he answered, "but we're just talking about finding sandy paths between beautiful bedrock exposures. There's bedrock exposed everywhere, but there's also sandy paths and valleys between beautiful bedrock exposures. So we can concentrate driving on softer sand and take occasional side trips to do contact science, and it should be fine." You can see the truth of that statement here -- so many different kinds of bedrock exposed in the walls of Moonlight Valley just past the point where they entered it.

Here is what Ken Herkenhoff had to say about those days of the mission:
Sol 534 update by Ken Herkenhoff: No Drive (5 February 2014)
The Sol 533 toe dip went well, leaving the rover's front wheels on the crest of the dune. The Sol 534 plan was to drive over dune into Dingo Gap, but late in the day it was cancelled. The Rover Drivers had some concerns about the terrain and it was decided that delay the drive to Sol 535 in order to give them more time to plan the drive.

Sol 537-539 update by Ken Herkenhoff: Traversing the Dune (7 February 2014)
This week the data from MSL have been arriving later and later each day, as expected because Mars' day is about 40 minutes longer than Earth's day. The data arrived so late yesterday that no planning was possible, and now we are back in "restricted" planning. But the data look good, showing that the rover successfully traversed the dune in Dingo Gap.
The arm will be deployed (using APXS and MAHLI) on Sol 537 to investigate some interesting veins or minerals filling fractures in front of the rover. ChemCam will search for frost early on the morning of Sol 538, then analyze targets Collett and Mussell along the vein/fracture fill later in the day. Then the rover will be commanded to drive about 40 meters through Dingo Gap and take the usual post-drive images to enable planning on Monday. SAM will use its mass spectrometer to measure the atmosphere overnight, followed by untargeted camera and ChemCam observations on Sol 539. Another busy weekend plan for MSL!
{kind=link}

So they did decide to go across Dingo Gap, but it took a lot of time for them to assess whether they could cross the dune. They took their left turn toward it on sol 521, but didn't drive across it until sol 535 -- two weeks later. I asked Ashwin if crossing sand is always going to be this hard, thinking about that sand dune field that stands between us and Mount Sharp. He said: "Every time we do something for the first time with this rover, we spend a lot of time making sure it's safe. Crossing over a sand dune like this, a meter high at its highest, that was a first-time activity for us. Especially with the Spirit and Opportunity experiences, we wanted to make sure to do it safely. Now, the next time we encounter a drift, we should be able to analyze it much quicker."
The Opportunity experience was a particular nightmare for the rover drivers. It's instructive to look at an Opportunity route map that covers the period both before and after Opportunity got stuck in a sand drift, a site they later named Purgatory. Just before they got bogged down, on sol 410, they achieved 220 meters in one sol. That still stands as the one-sol driving record. It took them 45 sols to get out of that sand trap, and you can see how cautious they were driving the rover after that, compared to the long, straight, blind drives they were doing before Purgatory. (I've seen Steve Squyres describe the before-Purgatory drive style as "bombing along at top speed with our eyes closed", while holding his hand over his eyes.) They now take no chances with sand drifts of unknown properties with either rover. But the good news is that, with the help of HiRISE, they can now spot from orbit any drift large enough to pose a potential hazard to Curiosity.

Ashwin told me about one interesting challenge they faced as they crossed over the dune that had nothing to do with wheels or traversibility. It had to do with Earth communications. We normally think of Curiosity's communications as coming via orbital relay. Two orbiters, Mars Odyssey and Mars Reconnaissance Orbiter, pass over Curiosity's landing site in the rover's afternoon, receiving data through the rover's cylinder-shaped UHF antenna. The orbiters also pass over the site in the wee hours of the morning. Almost all of the rover's wonderful images and data come down to Earth from the orbiters. But that's just downlink.
Uplink -- the part of the loop where Earth sends data to the rover, all the commands the rover receives -- usually happens with a communication session directly from a Deep Space Network antenna to the hexagon-shaped high-gain antenna (HGA) on the rover deck, with no orbiter in the mix. They do that in the rover's morning, typically around 9 or 10 am local time, so that the rover gets its instructions for the day and then starts right to work. For that to happen, the high-gain antenna needs to be able to "see" Earth in the sky.

There were problems seeing Earth during the dune crossing, and the story is an interesting illustration of how complex this mission is -- it involves planetary orbits, rover design, local topography, and challenging drive surfaces. Ashwin explained in an email:
Here's the story. Earth rises in the east. Currently we're at a point in the mission (ephemeris) where Earth rises relatively late, meaning that it's very low on the horizon when we do our HGA session.
Meanwhile the HGA is located toward the middle of the rover, and is occluded when pointing rearward (at low angles) by the UHF, the LGA [Low-gain Antenna, or pole antenna], and the RTG [Radioisotope Thermoelectric Generator, the power supply that sticks out the back end of the rover]. The fact that we've been driving southwest sometimes requires us to turn for comm at the end of drives, depending on the exact drive direction (to move the hardware out of the way of an eastward view for the HGA).
Now about this week. Crossing Dingo Gap, we first drove up the dune approximately toward the west. This "lowers" the rear hardware, or "raises Earth", making the HGA situation better. However, driving down the far dune face toward the west, and down the sloping valley to the west, have the opposite effect. This is the reason we needed to move the HGA window.
The gap's topography "mask" on the sky didn't play a direct role [that is, the low rock faces on either side of the gap didn't block Curiosity's view of Earth], but the orientation of the canyon does, as does the desire not to turn for comm while on the dune, or turn on the tricky rocky terrain just after the dune. [That is, they didn't want to shimmy the wheels back and forth to do a turn in place to get the hardware out of the way of the HGA while the rover was sitting on soft sand -- they wanted no risk of digging in to the dune.] So the best choice was to move the HGA window later and "raise Earth" that way.
Incidentally, north-south canyons like those on the Mt. Sharp ascent would cause topography to play a larger role in blocking the eastward view.
To solve the communications problem, they had to shift their morning communications session much later, finishing at 11:15 on sol 534, and at 11:45 on sol 535. That compresses the rest of their day; it leaves only a few hours for the rover to drive and do all the science observations.
When I talked with Ashwin today about upcoming plans, I had the map in front of me:

I mentioned that if you look at the map, there seem to be pinch points coming up, where the walls come together. Ashwin said "We did an initial study of them in HiRISE and we think it's all passable. That's one of the criteria we had for committing to the 'pink route.' Based on our experience with the worst one, which was Dingo Gap, we think we'll be able to get through them. It'll just mean we'll have to slow down and pick our route carefully." Choosing their line, he said, like a rafter plotting his course across river rapids.
Both Ashwin and John have now mentioned this "pink path" so I asked him what the other colors of paths were, and where. He laughed and said they really need a better name for it. He said that when they decided they needed to drive the rover on this softer, sandy terrain, "We had a tiger team that was studying the alternate paths. The rapid transit route was the baseline -- that was the green path -- and there were pink, yellow, teal, orange -- all different ways of weaving through the terrain that varied in distance, in the fraction of each segment that was on different kinds of terrain (sandy, bedrock, dissected bedrock, ridged)..." The "pink path" won -- it was not the shortest, but had predominantly benign, sandy material to drive on.
I figured I'd also ask him what "KMS-9" stood for. He said that when they initially picked the "rapid transit route" to Mount Sharp, several people including John Grotzinger's grad student Katie M. Stack were tasked with examining the HiRISE images along the route and identifying likely stopping points. The potential stopping points were labeled on the project's internal maps with the initials of the people who proposed them. This is just temporary nomenclature, shorthand to support further study of possible stopping points. If they commit to actually visiting a spot, they'll quit using the initials and actually give the place a name based on the name of the quadrangle it's in -- that's what happened to the formerly initialed spots now named "Cooperstown" and "Darwin." It's sort of an accident that the initial terminology got "out into the wild," and Ashwin wanted me to make it clear that the science team is not planning to name spots on Mars after themselves!
Support our core enterprises
Your support powers our mission to explore worlds, find life, and defend Earth. You make all the difference when you make a gift. Give today!
Donate