
 Explore Worlds
Explore Worlds Find Life
Find Life Defend Earth
Defend Earth


A.J.S. Rayl • Apr 30, 2011
Mars Exploration Rovers Update: Spirit Recovery Attempt Continues, Opportunity Sprints to Endeavour
As Opportunity drove her little robot heart out, breaking the 28-kilometer mark on her odometer, and driving the longest backward drive ever, April proved to be another month of exhilarating highs for the Mars Exploration Rover mission and one extended low with only silence from Spirit, despite intensified efforts by her Earth crew to establish contact.
The MER plan forward calls for the stepped-up recovery operations -- or campaign to listen for and reach out to Spirit at Gusev Crater – to continue through most of May. Then, in June, "greatly reduced" recovery operations will begin and run through the end of the year. "We have pretty well exhausted some of the seven primary strategies, and we're continuing down our list," reported Bill Nelson, the chief of the rover engineering team at the Jet Propulsion Laboratory (JPL), where the Mars Exploration Rovers (MERs) were “born” and are being managed.
During the extended recovery operations, the team will try things considered to be conceivable last-ditch efforts, said Nelson. For the most part, these involve responses to unlikely scenarios. However, with opportunities to listen and reach out being reduced to about once a week in June, only 30 opportunities at best will remain for Spirit to respond before the end of 2011. Thus, the Radio Science Team at JPL may decide to employ prime strategy techniques as well during this time.
"We may come back and re-visit some of our primary strategies here and there on the off-chance that dust deposition is higher than we had anticipated, but even using a prime strategy at that point kind of falls in within all the other Hail Mary things – as in not that likely” said Nelson, to evoke a response.
It just may be that Spirit has accumulated so much of the powdery fine Martian dust that the solar-powered rover has not been able to take in enough sunlight on its arrays to re-charge the main power batteries enough to recover. Dust accumulation has always been a leading-contender hypothesis as the most likely "cause of death" projected for the rovers. By all accounts, without the numerous dust-cleaning events that have taken place during the last seven years, neither rover would be alive today.
 Simulation of Spirit
Simulation of SpiritThis artistic image -- in which Astro0 has placed a two-dimensional MER into a scene created by pictures taken by the real rover -- generally illustrates Spirit's current location, just to the west of Home Plate in an area known as Troy, inside Gusev Crater. Although the angles are admittedly a little off and the disturbed soil isn't quite right, the image offers the casual viewer a glimpse into the present scene on Mars.
Credit: NASA / JPL-Caltech / ©Astro0 2009
The last of the potential dust-cleaning wind gusts could kick up as late as July, the end of the Martian summer, so there is a chance Spirit could suddenly clear her presumed dust congestion and phone home. But if a dust-clearing event should happen at that time, it would be the latest in the time of season, by rover history, that such an event would have occurred -- meaning, it’s a long shot. Still, before July there is still May and June.
"The fact that we haven't heard from Spirit by now though does say that something is seriously wrong," proffered John Callas, MEP project manager, of JPL. "It's like having a very sick family member who isn't going to get better. It's only going to go one way. We want to do our due diligence and make sure we do everything we can because of the affections we have for this rover."
There is only so much that can be done from down here, and the countdown to the end of mission for Spirit has quietly, unofficially begun behind the scenes. Word is that NASA headquarters is preparing to announce that MER will continue as a one-rover mission around the first of June.
That remaining one rover though is living up to her reputation as "Little Miss Perfect" and moving along in stark contrast to her twin on the other side of Mars. Opportunity has been making tracks, lots and lots of tracks on the continuing journey to the gargantuan 22-kilometer (13.70 mile) diameter Endeavour Crater, tallying more than a half-mile this month alone. In crossing the 28-kilometer mark on April 19th, and just seven sols or Martian days after that logging the longest backward drive ever -- 152.18 meters -- on April 26th, the rover even broke and set records along the way.
"It is remarkable," said Ray Arvidson, deputy principal investigator for rover science, of Washington University St. Louis. "She's demonstrating that she can sprint," added Callas. " This is far beyond anything we thought the rover could do during the prime mission."
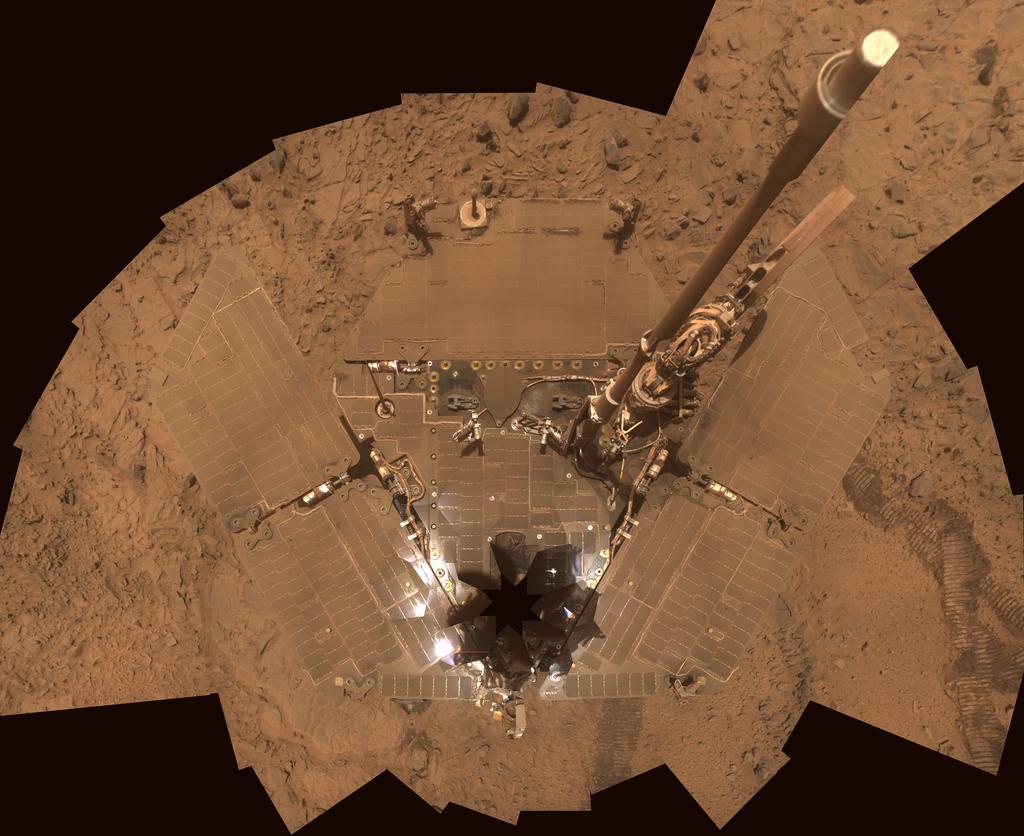 That darn dust
That darn dustSpirit's deck was so dusty that the rover almost disappeared into Martian landscape in this image assembled from frames the rover took with her Pancam from her Sol 1355 through Sol 1358 Oct. 26-29, 2007).Dust on the solar panels reduces the amount of electrical power the rover can generate from sunlight each sol. The vertical projection used here produces the best view of the rover deck, though it distorts the ground and antennas somewhat. The eight-pointed star shape near the front of the rover (bottom of image) marks the location of the camera mast, which is out of view of the Pancam atop the mast. This mosaic view in approximate true color is a composite of frames taken through the Pancam's filters centered on wavelengths of 600 nanometers, 530 nanometers and 480 nanometers.It is possible that Spirit has not responded since going into hibernation in March 2010 because she is coated in dust, mucu like she was when she took these images in late 2007. Credit: NASA / JPL-Caltech / Cornell
In roving past the 28-kilometer mark, Opportunity cruised beyond the Apollo 15 lunar rover’s established record of 27.76 kilometers. The lunar rovers or “Moon buggies" were used on the last three Apollo missions and were driven by astronauts.
For the Mars rover, that drive this month moved Opportunity up to being the third longest-lived robotic rover on another celestial body. The Soviet Union's Lunokhod 2, with 37 kilometers on its odometer, tops the longevity list, with the Apollo 17 lunar rover coming in second, holding a drive record of 35.89-kilometers. Opportunity is now, hands down, as previously covered in depth in the MER Updates, the longest-lived robot on Mars.
This week, Opportunity drove through an intriguing, "inverted relief" terrain area, marked by ridges of fractured bedrock. For some years now, the rover's courses have been charted with the aid of images taken by the HiRISE camera, the Context Camera, and the CRISM imager, onboard the Mars Reconnaissance Orbiter (MRO) so there was no real concern this passage could be a rover trap in any way. "The ridges we saw there are not tall enough or wide enough to present a mobility problem," Arvidson noted.
During the last couple of sols, Opportunity took time to look around the terrain with her color panoramic cameras (Pancams) and navigation cameras (NavCams), before taking off again, down the Meridiani Highway. Today the rover is scheduled to drive on toward a grouping of several impact craters, named Freedom 7, Sigma 7, Faith 7, and Friendship 7, for the NASA’s historic Mercury spacecraft. Opportunity is to spend the rest of the weekend and the first part of next week there in the small crater field taking pictures.
As April gives way to May, the MER team still holds out "a little hope," said Nelson, that Spirit will be responding soon. But the energy and focus for now has really turned to Opportunity’s last 5 kilometers (3 miles) to Endeavour Crater.
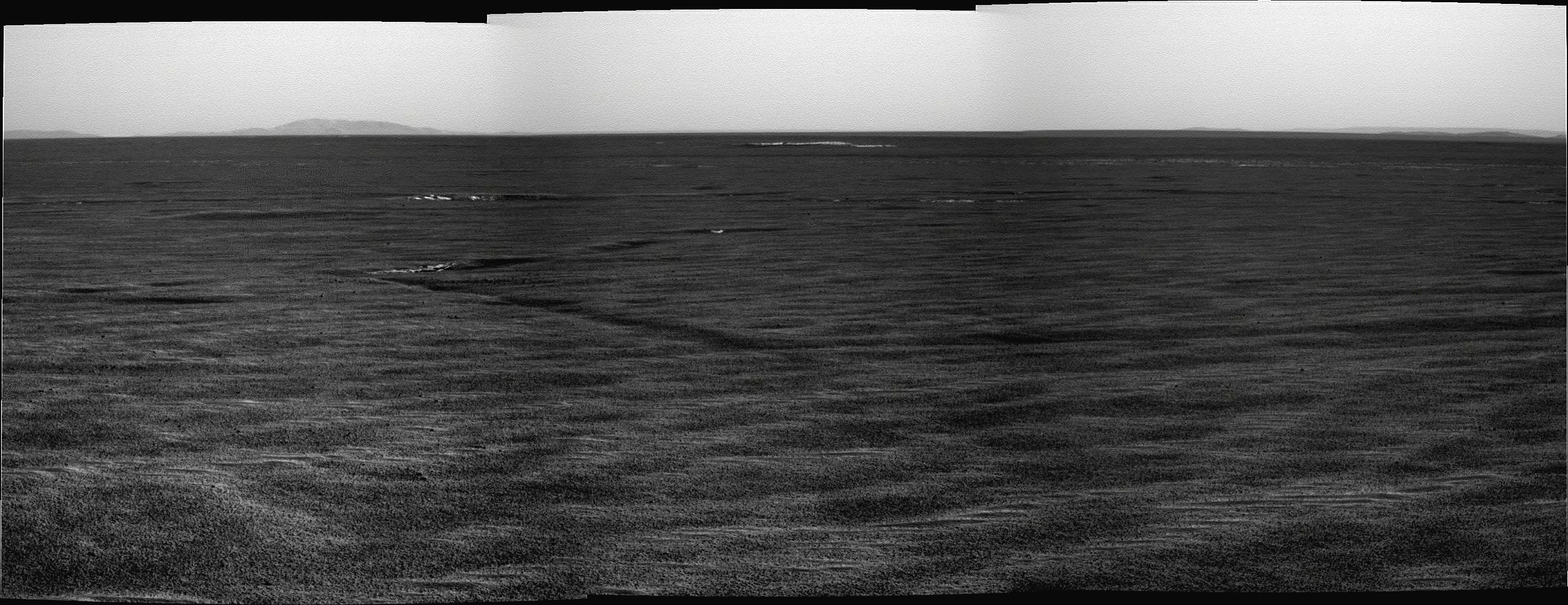 The Meridiani highway
The Meridiani highwayOpportunity took the series of the images that went into this wide angle view of her general route ahead to Endeavour Crater on her Sol 2574 (Apr. 21, 2011. Stuart Atkinson put the image together.
"See that white line, kind of a zig-zag, at the top of the image, just beneath the horizon -- that's a pair of craters with a few smaller craters scattered around them," he points out.The rover should be there as April turns to May.
Credit: NASA / JPL-Caltech / processed by S. Atkinson
Despite the silence of Spirit, new excitement is building as Opportunity gets closer to the big crater. “Opportunity’s directive is drive – and drive," said Arvidson. It's no secret that the phyllosilicate minerals on the rim of Endeavour – indications of a past flow of neutral water – are potentially the most exciting opportunity of exploration for the entire mission.
"I would say the exploration potential right now is greater than we thought on Sol 1 – that's counting both rovers," ventured Callas. "We're getting HiRISE images and information in the details, and we're seeing what the target looks like and it is exciting. There's varied terrain. It's going to be complex and challenging for the rover."
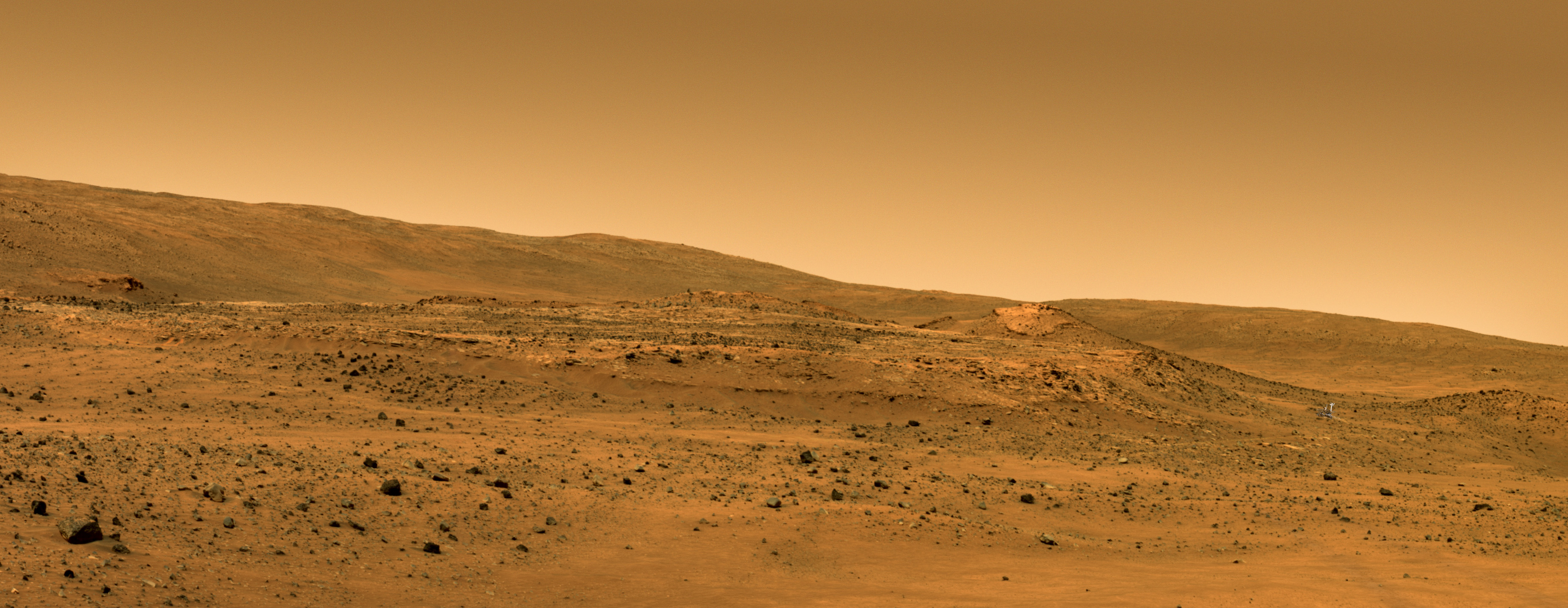 Spirit at Troy
Spirit at TroySpirit, which is about the size of a golf cart, can be seen here on the shoulder of Home Plate in this artist's rendition showing the rover's position, where she became mired in the sands of Ulyssess in an area the team dubbed Troy back in May 2009. The panorama was taken by the rover on he Sol 743 as she descended from Husband Hill toward Home Plate. Home Plate is circular plateau occupying the center of the image; click to enlarge to see the rover in the valley to its right.
Credit: NASA / JPL / Cornell / Glen Nagle
Spirit from Gusev Crater
Spirit is parked on the west side of Home Plate, her left wheels partially buried in a sandy pit, 7,730.50 meters (4.80 miles) on her odometer. She is exactly where she was when the last Martian winter took hold in February 2010, and more or less where she’s been since April 2009, when she was cruising along heading south, and her left wheels slipped long the edge of a shallow, completely hidden sand-filled crater and trapped her.
The Radio Science Team at JPL continues to listen and command for Spirit to recover from whatever fault mode she may have experienced during the last Martian winter. Utilizing NASA’s Deep Space Network (DSN) of radio receivers parked in key locales around the world, the team has been systematically sending commands over a range of frequencies and through a range of local solar times on Mars to cover both the possibility that Spirit's receiver has degraded and/or its clock has drifted significantly since March of 2010, which is when they received the rover’s last communiqué.
 Spirit
SpiritIn this picture of Home Plate, taken by the HiRISE camera onboard the Mars Reconnaissance Orbiter in 2009, you can easily see the stark white figure that is Spirit to the left (west) of the geologic formation in this image enhanced by rover poet Stuart Atkinson."If you look carefully you can actually see bright trailing leading to Spirit - this is the result of the (right front) broken wheel being dragged through the dirt, unearthing brighter material beneath," he notes. For more of Atkinson's enhanced images, poems, and thoughts. particularly of the targets being investigated by Spirit's twin, Opportunity, check out: http://roadtoendeavour.wordpress.com/
Credit: NASA / JPL-Caltech / UA / enhancement by S. Atkinson
The team is also continuing the commanding of extra-long ultra-high frequency (UHF) relay passes, during selected over flights by Mars Odyssey and MRO in attempts to elicit a response from the rover through the separate ultra-high frequency (UHF) system. This strategy accounts for possible rover clock drift or clock error, as well as serves to make the rover responsive to UHF relay if it is has experienced a mission-clock fault.
So far, all efforts have been futile. "We've done all the likely things," said Nelson. Now they’re well into the not-so-likely and even testing possible responses to highly unlikely scenarios.
Ockham’s Razor may hold in the end. Spirit may simply be coated with Martian dust and unable to recover. Way, way back in the beginning of the mission, the powdery fine Martian dust was an easily assumed agent of death for these rovers.
"Dust is always accumulating, because Mars is a dusty place," said Nelson. "If it weren't for cleaning events, both rovers would have died a long time ago. But these events are really only possible during the summertime when the atmosphere is warmer and more energetic. Most of the year, you simply don't get the winds it takes to blow this stuff off."
The good news that remains is that the end point of the dust storm season, historically speaking from rover experience, is equivalent to about the end of July. "There is a remote possibility that the dust accumulated a lot faster than expected – unlikely but possible – and that we have a late season cleaning event," Nelson offered, noting that it would be the latest of any such summer cleaning event experienced on the mission.
"There is a little bit of hope left on the team, and of course it is possible that one of our recovery strategies will get a response,” said Nelson. “But I have to tell you the odds of that happening are dropping all the time," he admitted.
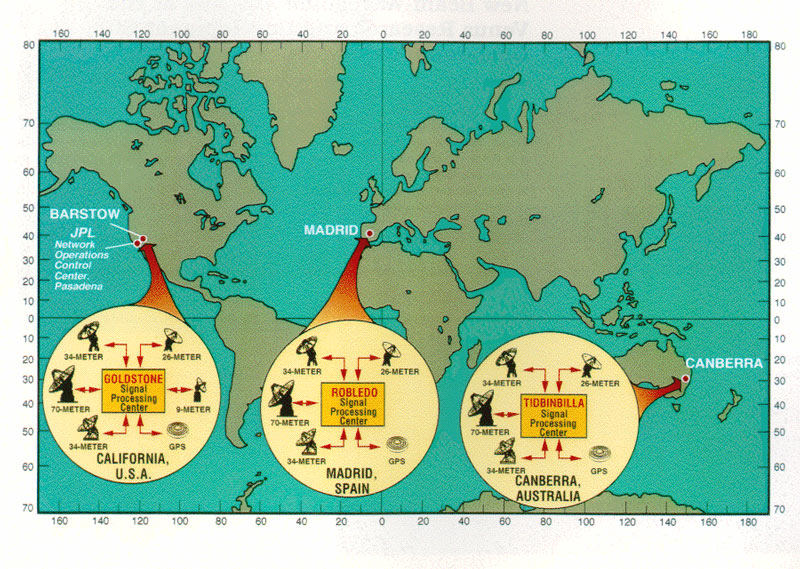 Deep Space Network (DSN)
Deep Space Network (DSN)NASA's Deep Space Network (DSN) is an international network of antennas that supports interplanetary spacecraft missions and radio and radar astronomy observations for the exploration of the solar system and the universe. The network also supports selected Earth-orbiting missions. The DSN currently consists of three deep-space communications facilities placed approximately 120 degrees apart around the world: at Goldstone, in California's Mojave Desert; near Madrid, Spain; and near Canberra, Australia. This strategic placement permits constant observation of spacecraft as the Earth rotates, and helps to make the DSN the largest and most sensitive scientific telecommunications system in the world.This map shows the locations of the three DSN signal processing centers and indicates the number and type of antennas at each one.Credit: NASA
Just because it may be obvious, dust isn't the only leading probable cause. "There are a lot of things that could wrong with this rover, like we could break a bond wire or have a solder joint come loose or freeze the batteries and when it warms up the battery casing breaks and the electrolyte drains out," Nelson said, pointing out a few possibilities. “Breaking any one solder joint in any of many of the hundreds of thousands of solder joints in those rovers could be fatal. Breaking a bond wire, similarly, most of those are going to be fatal. Cracking the battery and having the electrolyte drain out is almost fatal: we can actually wake up without a battery, just on solar array energy but we wouldn't have enough energy to run the transmitter so the rover would never actually talk to us. While not quite fatal in the same way, we still wouldn’t have a functioning mission."
Given the thousands of thermal cyclings the rovers have withstood, on so many hundreds of sols that saw the temperature rise and fall by 100 degrees, a broken wire here or there is a real possibility. Even so, something everyone seems to agree on is that Spirit deserves every opportunity. To that end, JPL's crew will continue the current recovery operations, which take place several times a day, through May 25th, informed Nelson. Following that, "greatly reduced recovery operations" -- averaging one effort each week -- will continue through the end of the year.
During the reduced efforts, the team will try to respond to some of the most unlikely of scenarios with last-ditch efforts or what the team calls 'Hail Mary's.' But they'll also continue trying some of the primary strategies, including, for example, commanding the rover via the auxiliary solid-state power amplifier (SSPA) on the chance the primary X-band transmitter has failed, as described in detail in last month's MER Update.
The team commanded numerous times over the auxiliary SSPA this past month, but hope is fading on this front too. "If it was going to work, it should have worked by now,” as Callas noted.
 The DSN's Goldstone antenna
The DSN's Goldstone antennaThe 70-meter antenna at Goldstone, pictured here, was brought back into service in early November 2010, after eight months of maintenance that included replacing the runners. It is being used in the current recovery operations of Spirit. Credit: NASA
If Spirit's recovery goes into overtime, which is likely now, the team will "open up" the efforts to include new approaches not tried. But, said Nelson, it makes sense to continue trying with a mix of techniques and approaches.
"Our thinking here is rather than go off and trying to do things that are only highly unlikely, let's at least try occasionally some of our primary strategies after July, just in case," he explained.
Other Hail Marys include commanding the rover at the nominal 15.625 uplink bit rate on the off-chance that a combination of events occurred that led the rover's flight software to not realize it had been in a fault mode, and thus the rover has not been communicating at the fault rate of 7.8125 bits per second.
If the rover woke up and did not realize it had been in a fault mode, it could be attempting to communicate at the lowest nominal rate of 15.625 bits a second. The team recently began listening at the nominal 15.625 bit rate, Nelson said, and would probably continue throughout May.
Another Hail Mary would involve commanding the rover on the LCP or the left hand circular polarization. Consider polarized light: if you get polarized light in one direction and you attempt to look at it through a polarizing filter, like your polarizing sunglasses, that is perpendicular to that, you get virtually nothing. The same is true of radio waves. Like light waves, radio waves can depolarize.
"We have been commanding on RCP – the right hand circular polarization, and if Spirit is listening on LCP instead of RCP, which is an unlikely fault – very unlikely actually – but if it's listening on LCP, then just like with the sunglasses scenario described, the signal level will be so diminished that nothing, no command, will get in,” explained Nelson. “Nobody's holding out a lot of hope for this one, but we're going to try a little commanding on this alternate polarization on the off-chance that a command does get in.”
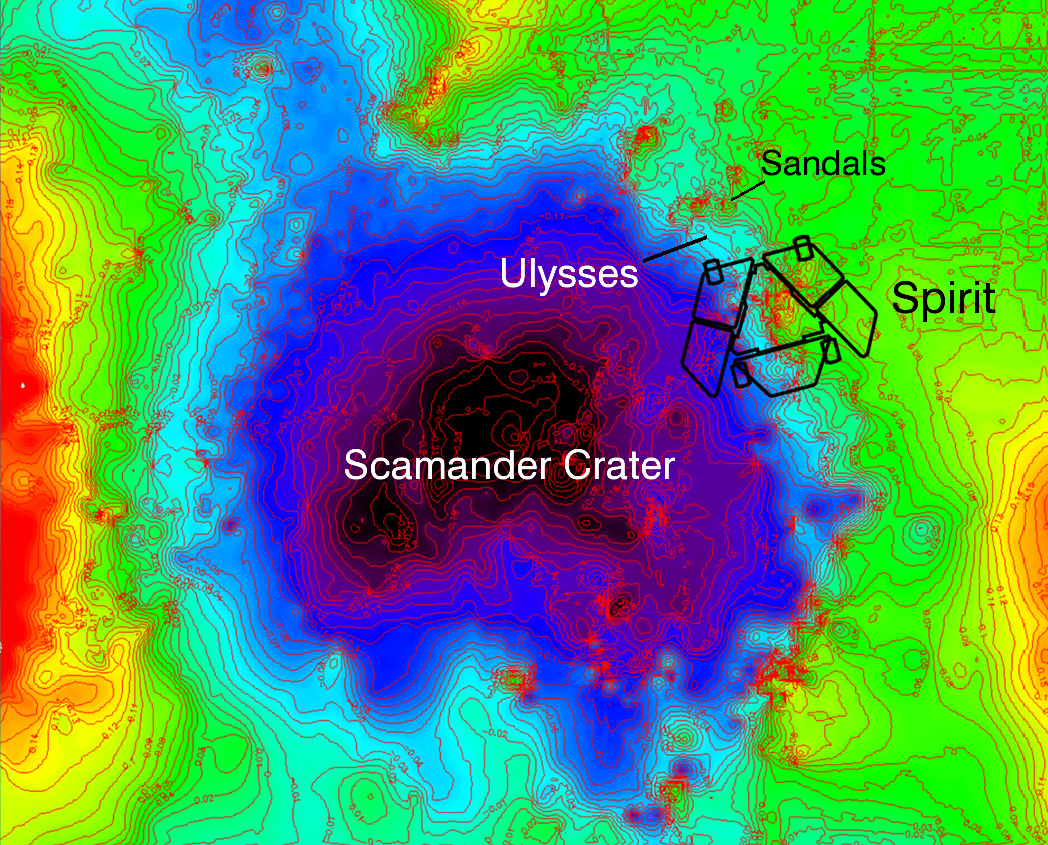 Topographic map of Spirit's location
Topographic map of Spirit's locationThis topographic map of Spirit's location at Troy shows low elevations in black, purple, and blue with high elevations in red. It was developed based on the rover's camera images of the location, taken before it got mired there is sand. Themodel has had a regional slope removed, revealing that Spirit's left wheels are sitting inside a subtle depression the team dubbed Scamander Crater. The right-side wheels are outside the depression.Credit: NASA / JPL-Caltech / OSU
The MER team members have also discussed assuming the rover is in mission clock fault and having the rover command itself out of that fault. "The advantage is it may turn on UHF windows, but again there are other ways of opening those UHF windows and no one holds out a lot of hope for that," said Nelson. "We could reset the mission clock. But any time you change the state of the vehicle when you don't know the current state, you're doing somewhat dangerous stuff. Still, it's another thing we can try to see if it improves the situation."
Once the May 25th end of standard recovery operations has passed, the reduced recovery operations will begin, and will take place at the pace of about one effort a week, leaving at best about 30 opportunities before the end of 2011 for Spirit to respond.
"We are working hard and doing everything we can," said Callas. "We do want to demonstrate to Spirit how much we really care about this rover by how hard we're working at making sure we've done everything."
"We just don't have that many opportunities left,” Nelson added.
Opportunity from Meridiani Planum
Opportunity drove out of March and into April, her pedal to the metal on the Meridiani highway and zipping along on her trek toward Endeavour Crater. Although the atmospheric opacity or Tau is still typically, seasonally high at 0.910, which basically means the skies overhead are very dusty, the rover began the month with a fairly energetic 400+ watt-hours. The dust factor of her solar arrays held steady at around 0.561, which means she is taking in and able to make use of about 50% of the sunlight beaming down through the ruddy skies to her solar arrays.
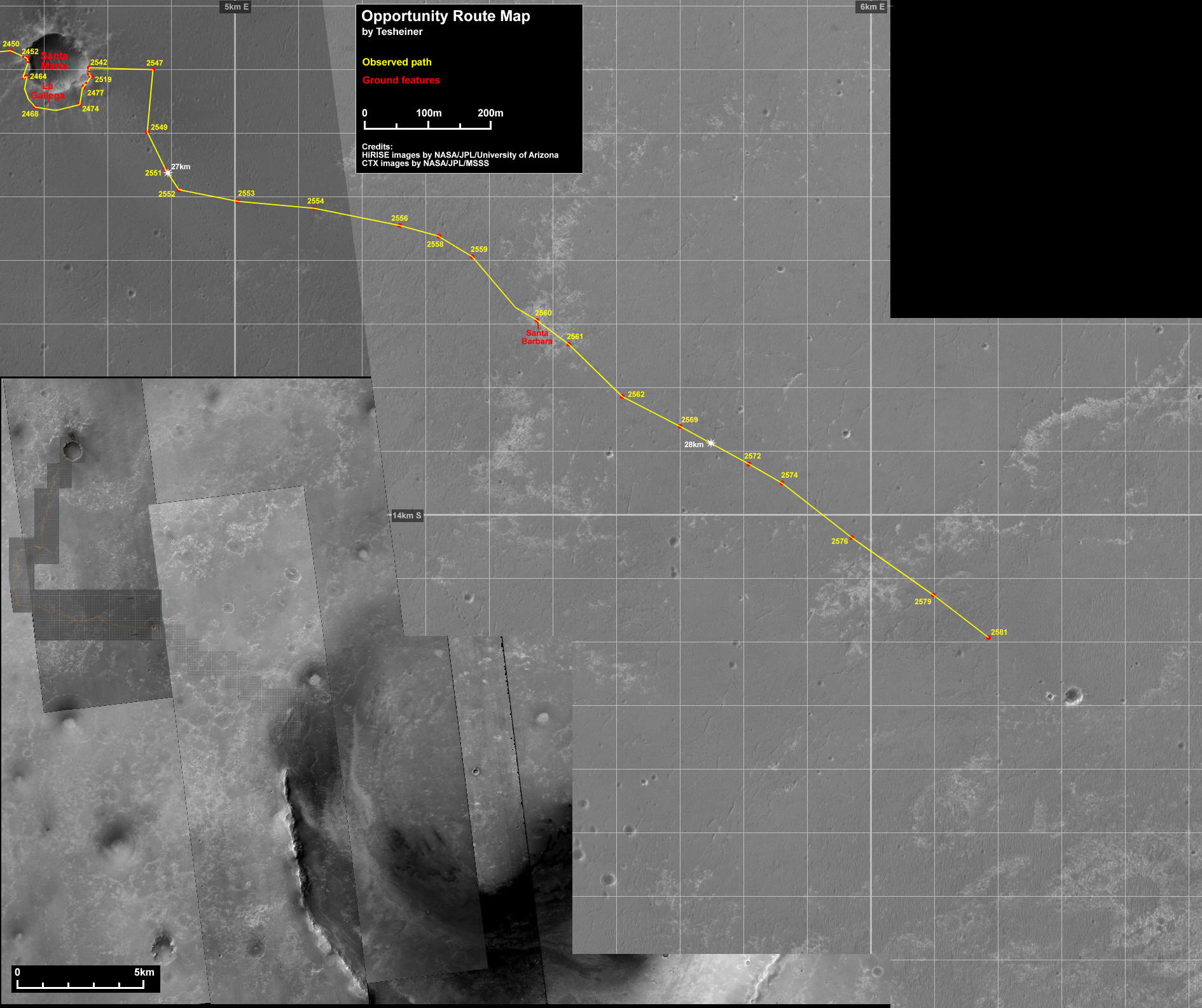 Opportunity's path
Opportunity's pathFrom images taken with the University of Arizona's HiRISE camera and the Malin Space Science Systems' Context Camera, both onboard MRO, Eduardo Tesheiner created this route map that shows Opportunity's path from Victoria Crater as the rover has driven toward Endeavour Crater. This month the rover put more than a half-mile behind her.Credit: NASA /JPL-Caltech / UAZ / MSSS / E. Tesheiner
Racing into the month, Opportunity drove more than 100 meters (328 feet) due east on Sol 2554 (April 1, 2011) – no fooling. Not only did she follow it up with another 100+-meter (328 foot) drive on the very next sol, but she went on to drive three more times during the first week of April.
The rover's commanded drive on Sol 2558 (April 5, 2011), however, hit a bump when the rover stopped her jaunt short after only 64.6 meters (212 feet). It happened automatically when she exceeded the right bogie angle limit. As previously reported here numerous times, the limit as to how far the rover can tilt in any given direction is set very tight to ensure safe driving.
While the engineers on Earth reviewed the situation, Opportunity took advantage of the time to conduct another diagnostic test of the miniature thermal emission spectrometer (Mini-TES) instrument on Sol 2557 (April 4, 2011). This instrument was permeated with dust during the global storm of 2007, and despite repeated attempts to "shake off" some of the dust by causing the instrument to vibrate, the Mini-TES on Opportunity has never effectively worked since that storm.
Last year, after being turned on, the Mini-TES failed to conduct a transferring kind of "handshake" with the PMA. "It timed out, and then said it wasn't talking to the flight software, and it was also not properly commanding the motors that would have changed the PMA azimuth, and we got a PMA fault," Nelson recounted. The ensuing diagnostics indicated the PMA azimuth motor is fine, and the issue is likely between the Mini-TES and the motor control board.
This month, the Mini-TES exhibited more anomalous behavior. Specifically, it failed to draw power. A functioning Mini-TES should draw 200-250 milliamperes up to about ¼ amp, according to Nelson. "We're not seeing that current draw," he said.
That would seem to suggest that the Mini-TES is simply not turning on, or that something somewhere between the instrument and motor control board has failed. Although the instrument investigation is continuing, the Mini-TES remains, Nelson said, "effectively out of commission."
 Unalaska
UnalaskaEn route to Endeavour Crater this month, Opportunity snapped the frames for this image of a rock the team calls Unalaska. It was named after an island located in the Aleutians West Census Area of the Unorganized Borough of the state of Alaska. It looks like you can pretty much see Russia from its front yard.
Credit: NASA / JPL-Caltech / Cornell / colorized by Stuart Atkinson
Once rover engineers analyzed Opportunity's stopped drive, they determined a modest terrain feature caused the safety software to trip, and that there were no hazards ahead. The rover resumed driving on Sol 2559 (April 6, 2011), with a 65.4 meter (215 foot) drive to the southeast, and moved on more the following sol.
Although Opportunity is driving almost exclusively backwards, her right front wheel actuator continued to draw a notable increase in current during the first week of April. It certainly wasn’t enough to slow this rover or the team. "It's a modestly enhanced actuator temperature current. We expected that," summed up Arvidson. Opportunity was given the green light to take off into the second week of the month.
"We expect that wheel to be modestly elevated, because it's been elevated for years, and elevated means it's drawing about 50 milliamps more," Nelson expounded. That slightly elevated current in the rover's right front wheel is something the engineers will always track carefully though.
Years ago, Spirit experienced a similar issue with her right front wheel before it went out. That rover has dragged her right front wheel like an anchor since April 2006. Likewise, Opportunity has carried on, driving backwards and pampering that wheel as much as possible. The rover continues, for example, to warm her right front wheel up to about minus-20 Celsius before driving, a technique the team instituted a couple of years ago when the right front wheel began running consistently "hot."
While the currents drawn by the rovers wheel actuators have spiked at times as high as 600 milliamperes, the average amperage the wheel actuators draw is 250 to 300 milliamperes, explained Nelson. "It's the average current that we're tracking more than anything else and from those averages, the right front wheel current is running about 50 milliamperes higher than the rest," he said. "It is not huge. And it has been much higher, particularly when we were driving forward."
 Rove on, Opportunity
Rove on, OpportunityThis rendered image of Opportunity is an image produced using "Virtual Presence in Space" technology, developed at JPL. It combines a photorealistic model of the rover and a false-color mosaic taken by the rover on Sol 134 (June 9, 2004) with its panoramic camera while in Endurance Crater, and show a clear view of the rover's right front wheel. Rover model by Dan Maas, synthetic image by Zareh Gorjian, Koji Kuramura, Mike Stetson and Eric M. De Jong.Credit: NASA / JPL-Caltech / Cornell
In fact, the engineers' hypothesis as to why the rover has recently experienced this elevated current issue is two-fold, said Nelson. "One is the forward driving at Santa Maria Crater led to the distinctively elevated currents we have seen in Opportunity right front wheel actuator recently, and, since that time, we're thinking that the amount of elevation of the current is in part temperature dependent. If we start driving earlier in the day, we're likely to see higher current than if Opportunity starts later when it's a bit warmer."
On Sols 2561 and 2562 (April 8 and 9, 2011), Opportunity drove another 62.26 meters (204.26 feet) and 112.31 meters (368.47 feet) respectively to the southeast. And, as she roved on, her right front wheel motor currents seemed to settle down from more than 100 milliamperes elevated back into the 40-to-50 milliampere range, the 'acceptable,' slightly elevated levels.
During the second week of April, the rover refined her attitude knowledge with a calibration activity on her inertial measurement unit (IMU). With the current pace of driving, this is something that the rover will have to do more frequently.
A DSN antenna tracking issue on April 12, 2011 prevented Opportunity from driving on her Sol 2565 as planned because the commands never got to Mars. But the rover certainly had the power – producing around 390 watt-hours – and seemingly the desire.
Four sols later, Opportunity was back on the road. She drove 100.31 meters (329.10 feet) on Sol 2569 (April 16, 2011). Her right front wheel motor currents continued to draw at reasonable slightly elevated levels. In addition to driving, the rover stayed up overnight that sol in order to provide the power subsystem with the data it needed to update the capacity estimate of the battery.
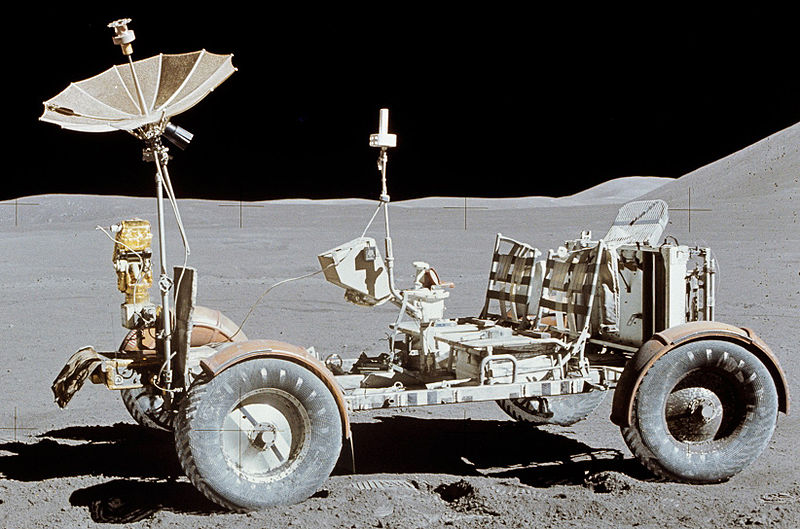 Apollo 15 Moon Buggy
Apollo 15 Moon BuggyThis image shows the Apollo 15 Lunar Roving Vehicle (LRV) on the Moon in 1971. The LRV could carry one or two astronauts, their equipment, and lunar samples.Credit: NASA
Then, on Sol 2572 (April 19, 2011), Opportunity put another 121.39 meters to the southeast under her rocker bogie. "That gave us a new odometry of 28,040.18 – and with that the rover broke the 28-kilometer mark," Nelson pointed out.
At the rover systems engineering meeting last week, the engineers discussed Opportunity’s achievement, said Nelson. During that discussion, Mike Seibert, the tactical uplink lead with MER, pointed out that with that drive, Opportunity broke another Apollo lunar rover drive record.
Opportunity passed the Apollo 16 lunar rover record of 26.55 kilometers some months ago, and back on her on Sol 1157 (April 26, 2007), she cruised by the Soviet Lunokhod 1 lunar rover drive record of 10,540 meters. But in logging that 28th kilometer, the robot field geologist bested the Apollo 15 Moon buggy's total distance of 27.76 kilometers. Moon buggies, as they were fondly called, were used on the last three Apollo missions and are different than the Mars Explortion Rovers in that astronauts drove the lunar rovers.
The only two remaining roving records for Opportunity to beat are: the Apollo 17 Moon buggy record of 35.89 kilometers, and the big one, the Lunokhod 2's record of 37 kilometers, the longest any robotic rover has ever been driven on another celestial body.
Although she got a late start, on Sol 2574 (April 21, 2011), Opportunity managed to put another 57.8 meters under her rocker bogie. "We are constrained in how long we can drive,” reminded Nelson. “We're able to drive after the uplink pass and before the Odyssey downlink pass. The uplink passes depend in part on what allocation we can get from the DSN, and since there is contention for that and we don't have the highest priority, timing tends to move around. On a day when the uplink pass is late in the sol and the Odyssey pass is coming over early – the pass varies depending on the geometry of things – then we don't have time to drive very far." Therefore, some drives, like Sol 2574, are shorter because of when they start.
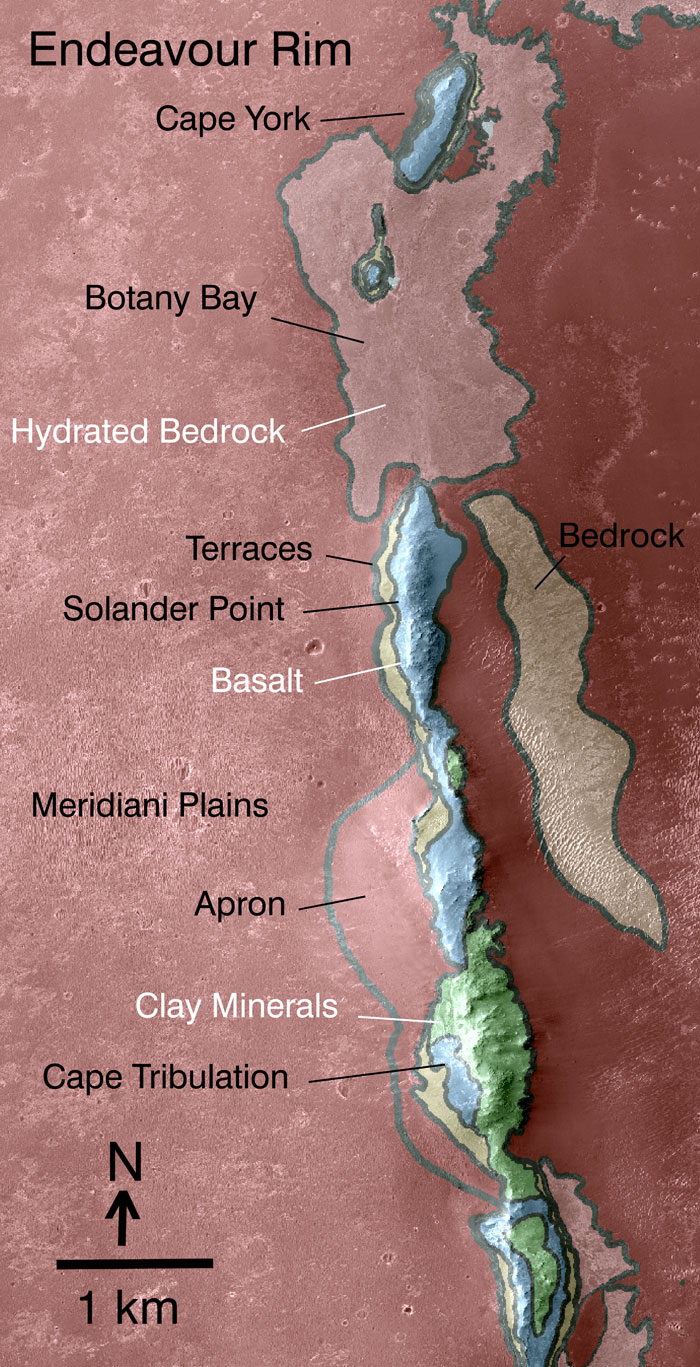 Endeavour west rim map
Endeavour west rim mapThis geological map -- based on data collected by the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM) on the Mars Reconnaissance Orbiter -- indicates some of the information gained from orbital observations of Endeavour Crater, the long-term destination for Opportunity since September 2008. Endeavour is about 22 kilometers (14 miles) in diameter and the largest crater the rover will likley visit. As indicated by the scale bar of one kilometer (0.6 mile), this map covers only a small portion of the crater's western rim. A discontinuous ridge runs north-south, exposing basalt (coded blue) and clay minerals (coded green) believed to be from a time in Martian history before the deposition of sulfates on the portions of the Meridiani Plains region that the rover has seen during its first seven+ years on Mars. The rover team plans to begin Opportunity's exploration of the Endeavour rim near Cape York, which appears nearly surrounded by exposures of hydrated bedrock. From there, the plan calls for the rover to head south along the rim fragment Solander Point, to Cape Tribulation, where clay minerals have been detected.Credit: NASA / JPL-Caltech / JHU-APL
After a quiet day for general recovery, Opportunity, producing 400 watt-hours under the still really dusty skies, took off again driving 134.06 meters last weekend, on her Sol 2576 (April 23, 2011).
Earlier this week, on Tuesday, Opportunity's Sol 2579 (April 26, 2011), the rover set a new backward driving distance record of 152.18 meters. "That is the most we've ever driven backwards in one drive," beamed Nelson. "It's a record breaker."
While it's not the most ever driven in a single sol – it is the most for any backward drive and taking place more than seven years into a 90-day mission is noteworthy. "In the old days, we went as far as 200+ meters driving forward, but we haven't done that for a long time. So we're doing well driving backwards," added Arvidson.
"Opportunity is turning into one of these active seniors who make the rest of us feel self-conscious," chuckled Callas. "Here's this little old rover zipping around up there every day, while we're saying to ourselves: 'I really need to do something more about my weight and getting a little more exercise.'"
Opportunity drove again last Thursday, her Sol 2581 (April 28, 2011) putting another 109.73 meters behind her. That brought her monthly total to 988.98 meters (0.614 miles), and her total drive distance to 28,493.95 meters (about 17.705 miles). For a rover guaranteed to go 600 meters, it is certainly impressive.
That drive put Opportunity in the middle of an intriguing, "inverted relief" terrain area. "It's an area about 60 meters (196.85 feet) wide that features fractured bedrock with material deposited by wind," Arvidson described. "It [appears] that a little bit of water coming through the fractures cemented the materials and then wind erosion took away the softer bedrock, leaving the fracture standing as high areas, so it's kind of inverted relief," he explained. The rover stopped to take in the sights with some Pancam and NavCam pictures of the terrain. "We'll probably have them down next week. They're not super high priority," said Arvidson.
The rover won't be hanging around to do any IDD work because "there's nothing special there in terms of the soil," he added. "It looks like everything else. It's really the morphology and the topography that interest us, and whether or not we are seeing these ridges as kind of raised areas that are preferentially cemented,” he said.
Opportunity is slated to drive again today on her Sol 2583 (April 30, 2011). "That drive ought to put us in between a group of four craters where we will do some imaging early next week," said Arvidson. The small crater field boasts impact craters of varying small sizes, spaced approximately as follows the way the rover drives:
1 2
3 4
In this rudimentary diagram,1 and 2 are little "dimple" craters nicknamed Sigma 7 and Faith 7, while 3, a slightly larger crater with some bright ejecta, is named Friendship 7, and 4 is the largest (about 25 meters x about 31 meters) dubbed Freedom 7, informed Nelson. The names are chosen in honor of NASA's historic Mercury spacecraft, the first space missions that took American humans into space.
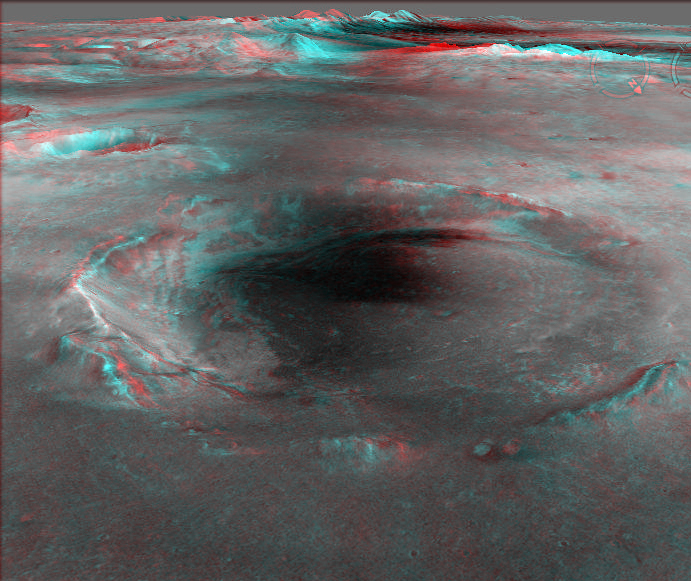 Endeavour in 3-D
Endeavour in 3-DGet your blue/red glasses and check out this 3-D picture of Endeavour Crater, Opportunity's next big attraction. Stuart Atkinson took this image from Google Mars, stretched it vertically to see more detail in the topography, and then rendered it in 3-D. "I love this view," he say. "It really shows very clearly the uneven nature of Endeavour's floor, and how those eastern, crater-spattered hills dominate the whole crater."Credit: Google Mars / S. Atkinson
All told, Opportunity drove more than a half-mile this month. As May begins, the rover will take care of its science business at the small field of craters. Once she's completed that assignment, it's back to driving. The rover probably won't even stop for its routine sampling of soil and bedrock until the end of May-beginning of June, Arvidson guesstimated.
The "hills" of Endeavour's rim looms larger and larger on the horizon. The big crater is now just under 5000 meters (about 3 miles) away and a new excitement is building among the MER team members as a whole new mission, within a mission, is about to begin – again.
"There is a sense excitement building," confirmed Callas. "This blows the doors off what we had planned for the prime mission, which as driving around within a kilometer of the landing site and looking at rocks on the plain. Here, we're going to be climbing mountains and trying to sleuth out the past history of Mars and the neutral pH associated with the phyllosilicate and whether they can preserve organics. We cannot prove organics, but we can establish the geologic context for what's going on."
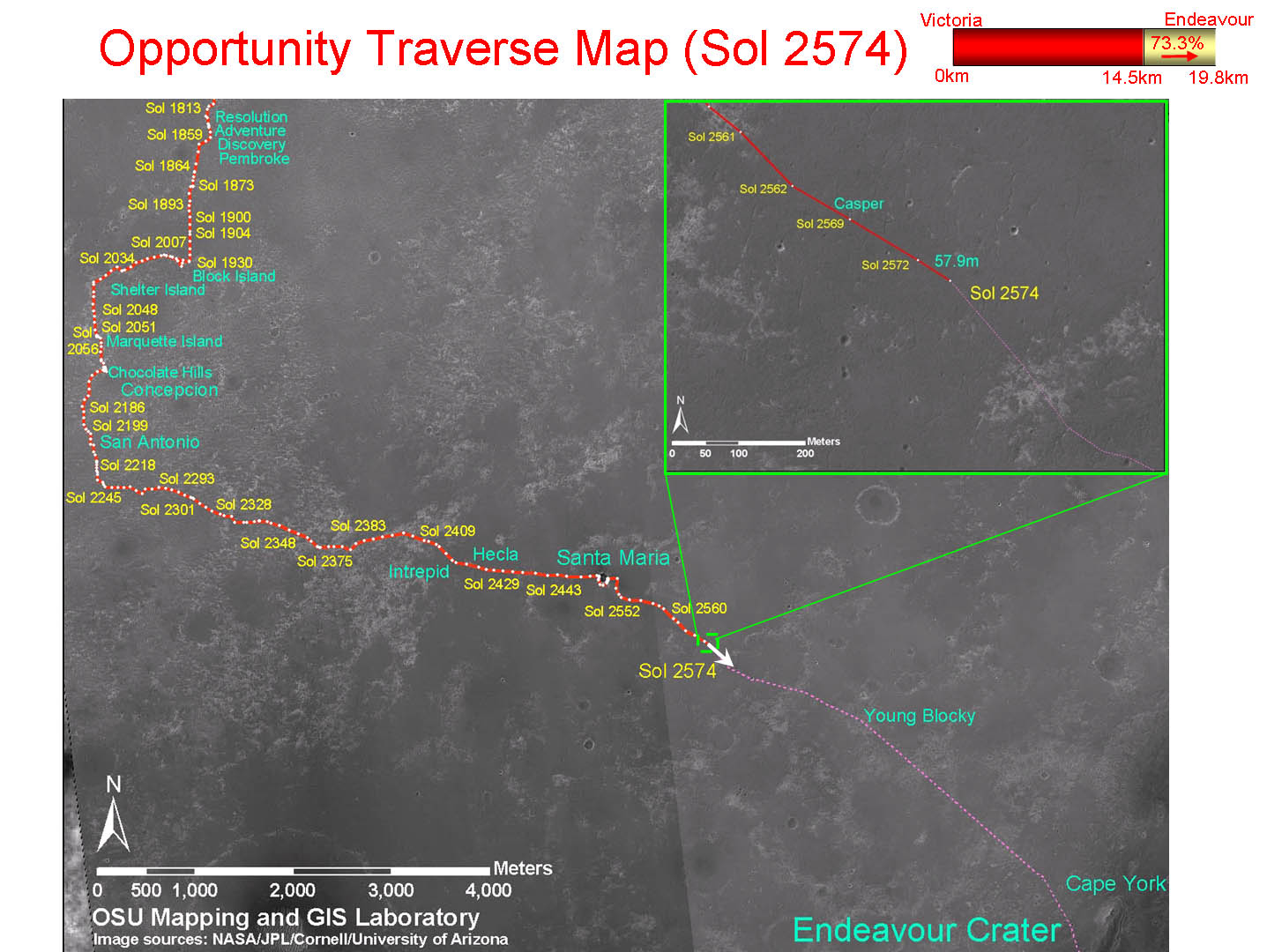 The route to Endeavour
The route to EndeavourThis map, released by the MER team and NASA-JPL just days ago, shows the official route Opportunity is now slated to take across Meridiani to the rim of Endeavour Crater. The rover is charted now to make "landfall" at the southern part of Cape York.
The course charted will take Opportunity up to Endeavour's Cape York by way of Botany Bay, Arvidson confirmed. "Botany Bay through CRISM data shows hydrated sulfates and it's an easier approach to the southern side of Cape York where the phyllosilicates are exposed."
The team has used the Adams Rover Terramechanics and Mobility Interaction Simulator (ARTEMIS), a multi-element, dynamic, 3-D computer simulation software, reported on in last month's MER Update, to determine the general paths the rover will take.
"As we get closer, we'll do higher and higher fidelity tests with the specific paths we have proposed to take. There will be some science planning for campaigns and then a separate group of us will be determining if we can reach – with low risk – the campaign sites we want," said Arvidson. "The Botany Bay deposits might represent some very young lakebed deposits, so we want to look at those," Arvidson continued. "The contact between the lakebed and Noachian crust will also be important. That's the first place we want to check out. And then – getting to the phyllosilicates – that's the climax."
Support our core enterprises
Your support powers our mission to explore worlds, find life, and defend Earth. You make all the difference when you make a gift. Give today!
Donate